中断(以蓝色小药丸/STM32 为例):
1. 内部中断和外部中断
- 内部中断 :由处理器内部事件触发。例如:定时器溢出、串口接收缓冲区非空等。
- 外部中断 :由按键等外部事件触发。
- 可屏蔽中断 :可由程序控制其屏蔽的中断。
- 不可屏蔽中断 (NMI) :不能由程序屏蔽的中断,如掉电等。
2. 各寄存器与基础概念
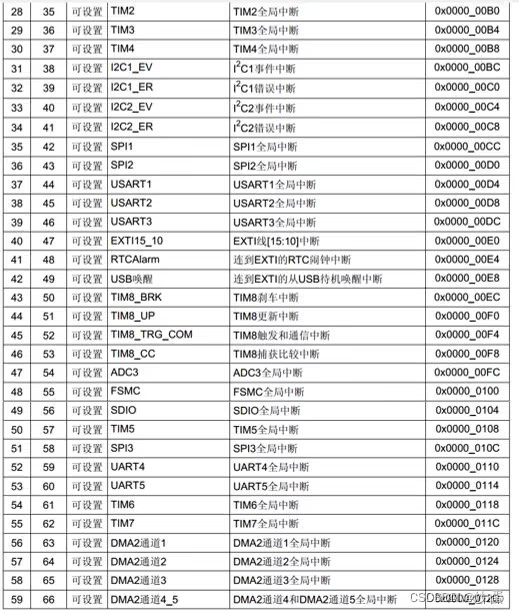
2.1 中断向量表
中断向量表建立了 中断事件 与 中断处理程序入口地址 的对应关系。
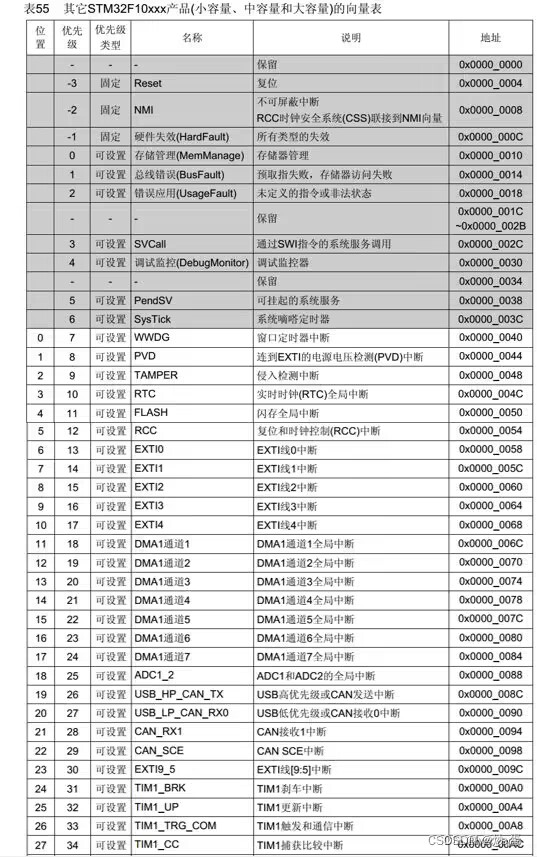
| 优先级 | 名称 | 说明 | 地址 |
|---|---|---|---|
| -3 | Reset | 复位 | 0x0000_0004 |
| … | TIMx | 定时器 | 0x0000_0080 |
| … | DMAx | DMA控制器 | 0x0000_0130 |
2.4 中断优先级
以“蓝色小药丸”(STM32F103)为例,只使用了 NVIC → IPR 寄存器的高四位。
- 共有 个优先级。
- 优先级数值越小,优先级越高。
优先级分组
需要设置 AIRCR 寄存器的第 8 到 10 位(PRIGROUP 字段)。
注意 :设置时需要向该寄存器的 位写入密钥
0x05FA,否则写入无效。
分组逻辑 :将上述的 4 位分成两个部分:
- 抢占优先级 (Preemption Priority) :高位部分。高优先级可以打断低优先级的中断,实现中断嵌套。
- 响应优先级 (Sub Priority / 候补优先级) :低位部分。当两个中断同时到达时,优先处理响应优先级高的,但不具备打断(嵌套)能力。
2.5 CMP 比较匹配基础
定时器模块包含一个自由运行的计数器(CNT)和一个或多个比较寄存器(Compare Register,CMP)。当 CNT == CMP 时,硬件触发 比较匹配事件,可配置为产生中断。这是定时器中断(PWM、输出比较、输入捕获等)的通用底层机制。
计数器值 CNT
│
▼
┌──────────────────────────────────────────┐
│ 0 ──────────────── CMP ──────── ARR │
│ ↑ │
│ 比较匹配,触发中断 │
└──────────────────────────────────────────┘
- ARR(Auto-Reload Register):定时器周期,CNT 到达 ARR 后归零(或反向计数)。
- CMP / CCR(Capture/Compare Register):比较值,CNT 到达此值时触发事件或中断。
- 每个通道通常有独立的 CMP 寄存器,可产生独立的中断。
3. PWM 比较匹配中断(CMP Interrupt)
4. 中心对齐模式下的双 CMP 中断(每通道两个比较点)
在四开关 Buck-Boost 等功率变换器中,PWM 采用中心对齐(上下计数)模式,每个通道配置两个比较寄存器:
struct PWMDutyVariable
{
bool buckBoostMode = false;
float dutyA = 0.0f;
float dutyB = 0.0f;
uint16_t ACMP1 = 8000; // 通道A — 上升沿阶段触发
uint16_t ACMP3 = 8000; // 通道A — 下降沿阶段触发
uint16_t BCMP1 = 8000; // 通道B — 上升沿阶段触发
uint16_t BCMP3 = 8000; // 通道B — 下降沿阶段触发
};4.1 计数器与双 CMP 的时序关系
- 计数器从 0 上升到 ARR,再下降回 0,构成一个完整 PWM 周期。
- CMP1:CNT 上升过程中与比较值相等时触发,对应 PWM 输出的前半周期事件。
- CMP3:CNT 下降过程中与同一(或不同)比较值相等时触发,对应后半周期事件。
- 每周期共触发 2 次 CMP 中断(上升 + 下降各一次)。
4.2 占空比与 CMP 值的关系
设 ARR = 8000(对应 100% 周期),占空比 :
对称模式下 CMP1 == CMP3;非对称模式下两者不同,可产生相移或不对称波形。
4.3 双 CMP 中断的典型用途
| 中断点 | 触发时机 | 典型操作 |
|---|---|---|
| CMP1(上升沿) | PWM 高电平开始前 | 更新下一周期占空比、触发 ADC 采样 |
| CMP3(下降沿) | PWM 高电平结束后 | 读取 ADC 结果、执行控制算法 |
| OVF(ARR 顶点) | 计数器到达峰值 | 同步多路 PWM、周期性保护检测 |
4.4 CMP 值更新时机
双 CMP 模式下,必须在 OVF 或 CMP 中断内更新 CMP 寄存器,避免在计数器运行中途写入导致毛刺:
// 在 OVF 中断(计数器归零/到顶)时统一更新,保证下一周期生效
void PWM_OVF_IRQHandler(void)
{
// 根据控制算法计算新占空比
float dutyA = ControlLoop_GetDutyA();
float dutyB = ControlLoop_GetDutyB();
// 对称模式:CMP1 == CMP3
uint16_t cmpA = (uint16_t)(ARR * (1.0f - dutyA));
uint16_t cmpB = (uint16_t)(ARR * (1.0f - dutyB));
PWM_SetCMP(CH_A, CMP1, cmpA);
PWM_SetCMP(CH_A, CMP3, cmpA);
PWM_SetCMP(CH_B, CMP1, cmpB);
PWM_SetCMP(CH_B, CMP3, cmpB);
}